Obstacle Avoidance Robot
- Description
- Curriculum
- FAQ
- Notice
- Reviews
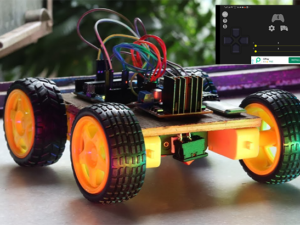
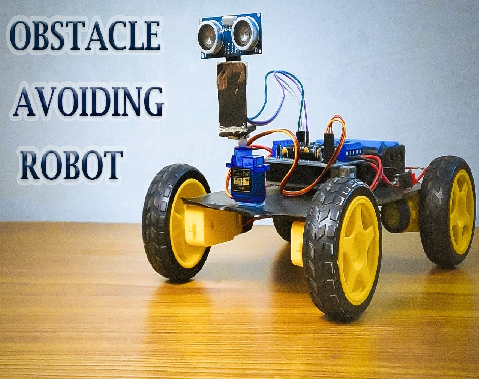
An obstacle avoidance robot is a type of mobile robot equipped with sensors and algorithms that enable it to navigate through an environment while avoiding obstacles in its path. These robots are commonly used in various applications such as indoor navigation, warehouse automation, and exploration tasks.
Typically, obstacle avoidance robots utilize sensors such as ultrasonic sensors, infrared sensors, LiDAR (Light Detection and Ranging), or cameras to detect obstacles in their surroundings. They gather information about the environment and use it to make decisions on how to navigate safely. Algorithms like obstacle avoidance algorithms or path planning algorithms are then employed to determine the robot’s movement, allowing it to navigate around obstacles and reach its destination efficiently.
These robots can be programmed to operate autonomously or controlled remotely by a human operator. They are used in a wide range of fields including robotics research, industrial automation, and even in consumer products like robotic vacuum cleaners.
-Confirm if your sensor is bad.
-Confirm your wiring connection to be sure no mistake.
-Please check code for possible errors.
-Please check if motor is still good.
-Confirm if wire is faulty.
-Please ensure your Install Micropython on thonny.
-If you are using Microblocks, please ensure you update the firmware until icon turns Green.
-Please check to be sure there is no conflicting program running on your computer.
-Confirm if your Ultrasonic sensor is working.
Productivity Hacks to Get More Done in 2024
— 18 May 2024
- Ensure you make good use of your time and avoid being distracted.
- Watch and practice video very well in order to gain Mastery.
- Try put different ways your Robot can behave based on the program written on it.


-Basic Python Programming knowledge.
-Computer.